
FRANKA
RESEARCH 3
Franka Research 3 is the reference world-class, force-sensitive robot system tailored for robotics and AI. It empowers researchers with easy-to-use robot features as well as with low-level access to robot’s control and learning capabilities.
WHY FRANKA RESEARCH 3

High-Quality Mechatronic System
Engineered and manufactured in Germany, Franka Research 3 is a reliable robot system. FR3 is equipped with high-quality sensors, best-in-class actuators and is optimized for performance and ergonomics.

Human-like Dexterity
The 7 degrees of freedom Arm of Franka Research 3 offers human-like dexterity, enabling motions in tight spaces and around obstacles.

High Sensitivity
The torque sensors integrated at each joint finely estimate external contact forces, and the fast control loop enables prompt reaction to collisions. The high sensitivity permits advanced torque or force control possibilities and provides smooth and intuitive hand-guiding capabilities.

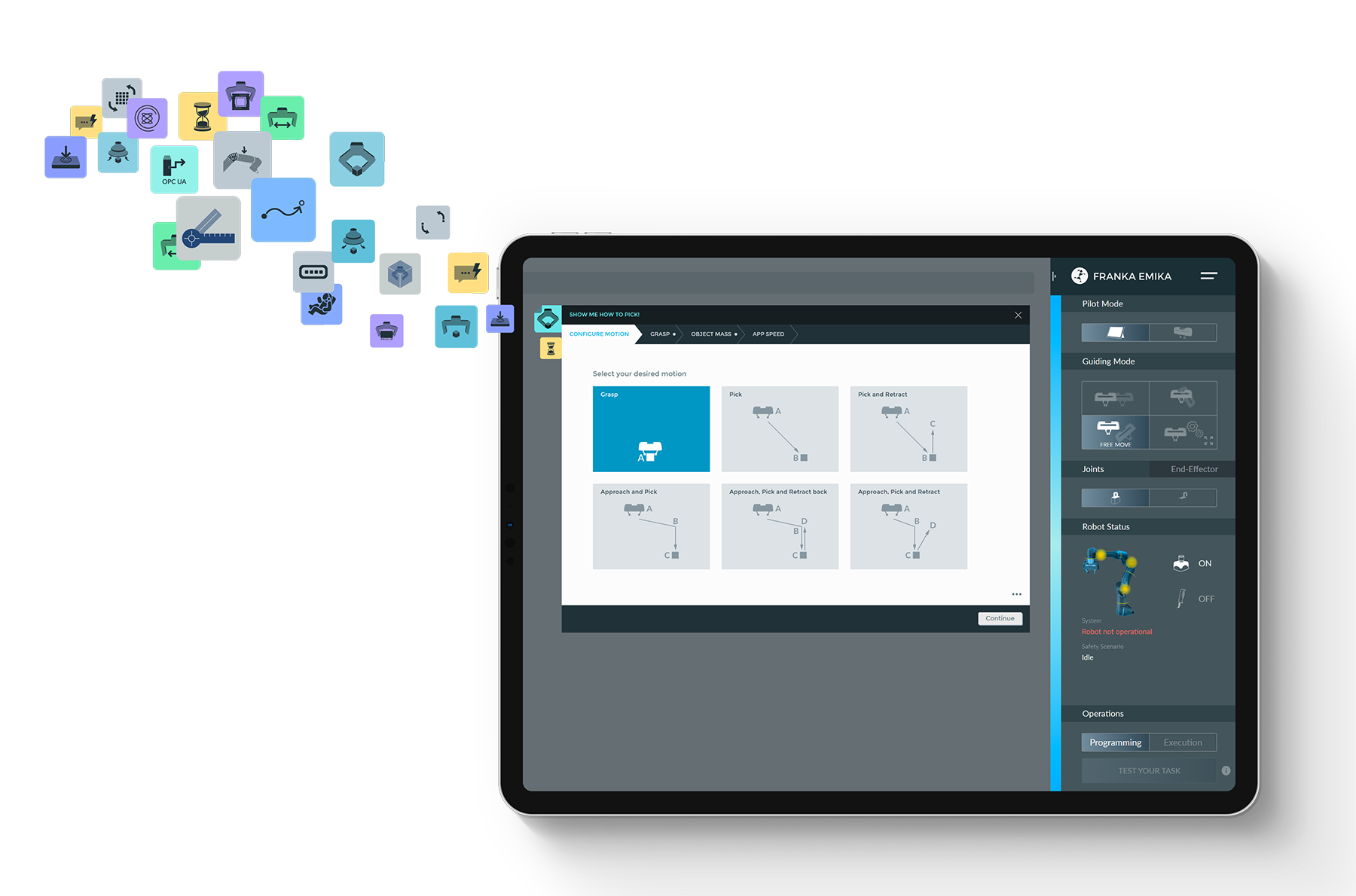
Versatile Control Interfaces
From the most intuitive programming UI for quick task setup to advanced direct joint control for deep research, Franka Research 3 adapts to the needs of every user.

Advanced Motion Control
High-frequency (1 kHz) motion control with a low-level, high-quality sensor data interface, ideal for motion control research and the development of highly specific behaviors, unachievable with most robots.

Open and Collaborative Platform
Join our global community of top robotics researchers, and integrate seamlessly with the leading open-source frameworks such as ROS 2, MATLAB and many others to reproduce, advance and share cutting-edge research.

Payload per Arm
3KG
Reach per Arm
855 mm

Workspace-efficiency
94.5 %

Position repeatability
<± 0.1 mm

Degrees of freedom
7
Integrated torque sensors
7
DISCOVER THE LATEST UPGRADES
Stay ahead with our newest features, extensions, and optimizations. FR3 and its software are continuously progressing, via free over-the-air updates.
Read System Image 5.9 announcement over the Franka Community







ENHANCED USABILITYFR3
DESK API
TORQUE CALIBRATION
FCI CONTROL ENHANCEMENTS
MUJOCO SUPPORT
JOINT-SPACE JOGGING
ADVANCED MOTION CONTROL
FRANKA CONTROL INTERFACE (FCI)

DIRECT CONTROL
DATA ACQUISITION
SAFETY
COMMUNITY

REAL-TIME CONTROL AND ROS INTEGRATION
The Franka Control Interface (FCI) allows a fast and direct low-level bidirectional connection to the Arm and Hand. It provides the current status of the robot and enables its direct control with an external workstation PC connected via Ethernet. By using libfranka, our open source C++ interface, you can send real-time control values at 1 kHz with 5 different interfaces:
- Joint level torque commands with gravity and friction compensation.
- Joint position or velocity commands.
- Cartesian pose or velocity commands.Simultaneously, you gain access to 1 kHz measurements of:
- Joint data, e.g., the position, velocity and link side torque sensor signals.
- Estimation of externally applied torques and forces.
- Various collision and contact information.The robot model library provides:
- Forward kinematics of all robot joints.
- Jacobian matrix of all robot joints.
- Dynamics, inertia matrix, Coriolis and gravity vector.Additionally, franka_ros connects Franka robots with the entire ROS 2 ecosystem, integrating libfranka into ROS 2 Control. It includes URDF models and detailed 3D meshes of our robots and end effectors, which allows visualization (e.g., RViz) and Gazebo simulation. Furthermore, the MoveIt! integration simplifies motion planning and gripper control, with example implementations demonstrating how to operate the robot using ROS 2.
Interface
THE RIGHT INTERFACE FOR EACH USE CASE
Three access levels to the robot address different needs and skills,
for the whole spectrum of robotics research.
 FCI
FCI| DESK | RIDE | FCI | |
| Workflow-based programming using Apps | |||
| Quick prototyping of experiments and demos | |||
| Execution of robot tasks | |||
| Development of customized Apps | |||
| Connection of third-party hardware | |||
| Connection of external resources | |||
| 1 kHz torque, position and velocity control | |||
| 1 kHz measurement of sensor signals and robot status | |||
| Access to kinematic and dynamic robot model | |||
| Integration with ROS and MATLAB & Simulink |
ADD-ONS
DISCOVER HOW TO ENHANCE YOUR ROBOT SYSTEM



BUILD, CREATE, INNOVATE
DEVELOP ON THE FRANKA ROBOT PLATFORM
The resource hub for developers working with the Franka Research 3 robot platform. Dive into a wealth of tools, libraries and documentation designed to accelerate your development journey. Whether you’re a seasoned developer or just starting out, you’ll find everything you need to build, create and innovate.
Ready to automate your
operations?
Request a consultation with our automation experts.
Get into the details

Brochure
pdf | 2 MB